# Objective Now that we can consolidate Bundles and Components under a single insert (thanks to #2975 and #6039), almost 100% of world spawns now look like `world.spawn().insert((Some, Tuple, Here))`. Spawning an entity without any components is an extremely uncommon pattern, so it makes sense to give spawn the "first class" ergonomic api. This consolidated api should be made consistent across all spawn apis (such as World and Commands). ## Solution All `spawn` apis (`World::spawn`, `Commands:;spawn`, `ChildBuilder::spawn`, and `WorldChildBuilder::spawn`) now accept a bundle as input: ```rust // before: commands .spawn() .insert((A, B, C)); world .spawn() .insert((A, B, C); // after commands.spawn((A, B, C)); world.spawn((A, B, C)); ``` All existing instances of `spawn_bundle` have been deprecated in favor of the new `spawn` api. A new `spawn_empty` has been added, replacing the old `spawn` api. By allowing `world.spawn(some_bundle)` to replace `world.spawn().insert(some_bundle)`, this opened the door to removing the initial entity allocation in the "empty" archetype / table done in `spawn()` (and subsequent move to the actual archetype in `.insert(some_bundle)`). This improves spawn performance by over 10%: 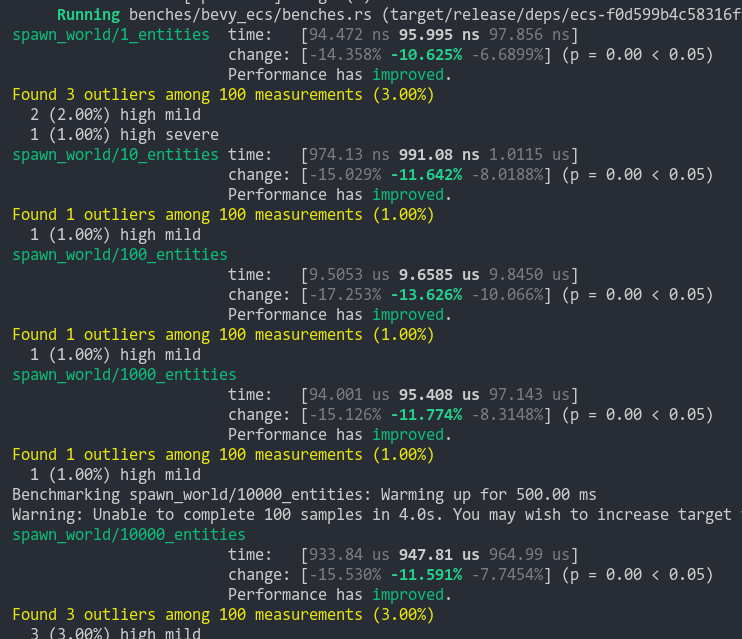 To take this measurement, I added a new `world_spawn` benchmark. Unfortunately, optimizing `Commands::spawn` is slightly less trivial, as Commands expose the Entity id of spawned entities prior to actually spawning. Doing the optimization would (naively) require assurances that the `spawn(some_bundle)` command is applied before all other commands involving the entity (which would not necessarily be true, if memory serves). Optimizing `Commands::spawn` this way does feel possible, but it will require careful thought (and maybe some additional checks), which deserves its own PR. For now, it has the same performance characteristics of the current `Commands::spawn_bundle` on main. **Note that 99% of this PR is simple renames and refactors. The only code that needs careful scrutiny is the new `World::spawn()` impl, which is relatively straightforward, but it has some new unsafe code (which re-uses battle tested BundlerSpawner code path).** --- ## Changelog - All `spawn` apis (`World::spawn`, `Commands:;spawn`, `ChildBuilder::spawn`, and `WorldChildBuilder::spawn`) now accept a bundle as input - All instances of `spawn_bundle` have been deprecated in favor of the new `spawn` api - World and Commands now have `spawn_empty()`, which is equivalent to the old `spawn()` behavior. ## Migration Guide ```rust // Old (0.8): commands .spawn() .insert_bundle((A, B, C)); // New (0.9) commands.spawn((A, B, C)); // Old (0.8): commands.spawn_bundle((A, B, C)); // New (0.9) commands.spawn((A, B, C)); // Old (0.8): let entity = commands.spawn().id(); // New (0.9) let entity = commands.spawn_empty().id(); // Old (0.8) let entity = world.spawn().id(); // New (0.9) let entity = world.spawn_empty(); ```
{kind=link}
548 lines
16 KiB
Rust
548 lines
16 KiB
Rust
//! Hierarchy and transform propagation stress test.
|
|
//!
|
|
//! Running this example:
|
|
//!
|
|
//! ```
|
|
//! cargo r --release --example transform_hierarchy <configuration name>
|
|
//! ```
|
|
//!
|
|
//! | Configuration | Description |
|
|
//! | -------------------- | ----------------------------------------------------------------- |
|
|
//! | `large_tree` | A fairly wide and deep tree. |
|
|
//! | `wide_tree` | A shallow but very wide tree. |
|
|
//! | `deep_tree` | A deep but not very wide tree. |
|
|
//! | `chain` | A chain. 2500 levels deep. |
|
|
//! | `update_leaves` | Same as `large_tree`, but only leaves are updated. |
|
|
//! | `update_shallow` | Same as `large_tree`, but only the first few levels are updated. |
|
|
//! | `humanoids_active` | 4000 active humanoid rigs. |
|
|
//! | `humanoids_inactive` | 4000 humanoid rigs. Only 10 are active. |
|
|
//! | `humanoids_mixed` | 2000 active and 2000 inactive humanoid rigs. |
|
|
|
|
use bevy::prelude::*;
|
|
use rand::Rng;
|
|
|
|
/// pre-defined test configurations with name
|
|
const CONFIGS: [(&str, Cfg); 9] = [
|
|
(
|
|
"large_tree",
|
|
Cfg {
|
|
test_case: TestCase::NonUniformTree {
|
|
depth: 18,
|
|
branch_width: 8,
|
|
},
|
|
update_filter: UpdateFilter {
|
|
probability: 0.5,
|
|
min_depth: 0,
|
|
max_depth: u32::MAX,
|
|
},
|
|
},
|
|
),
|
|
(
|
|
"wide_tree",
|
|
Cfg {
|
|
test_case: TestCase::Tree {
|
|
depth: 3,
|
|
branch_width: 500,
|
|
},
|
|
update_filter: UpdateFilter {
|
|
probability: 0.5,
|
|
min_depth: 0,
|
|
max_depth: u32::MAX,
|
|
},
|
|
},
|
|
),
|
|
(
|
|
"deep_tree",
|
|
Cfg {
|
|
test_case: TestCase::NonUniformTree {
|
|
depth: 25,
|
|
branch_width: 2,
|
|
},
|
|
update_filter: UpdateFilter {
|
|
probability: 0.5,
|
|
min_depth: 0,
|
|
max_depth: u32::MAX,
|
|
},
|
|
},
|
|
),
|
|
(
|
|
"chain",
|
|
Cfg {
|
|
test_case: TestCase::Tree {
|
|
depth: 2500,
|
|
branch_width: 1,
|
|
},
|
|
update_filter: UpdateFilter {
|
|
probability: 0.5,
|
|
min_depth: 0,
|
|
max_depth: u32::MAX,
|
|
},
|
|
},
|
|
),
|
|
(
|
|
"update_leaves",
|
|
Cfg {
|
|
test_case: TestCase::Tree {
|
|
depth: 18,
|
|
branch_width: 2,
|
|
},
|
|
update_filter: UpdateFilter {
|
|
probability: 0.5,
|
|
min_depth: 17,
|
|
max_depth: u32::MAX,
|
|
},
|
|
},
|
|
),
|
|
(
|
|
"update_shallow",
|
|
Cfg {
|
|
test_case: TestCase::Tree {
|
|
depth: 18,
|
|
branch_width: 2,
|
|
},
|
|
update_filter: UpdateFilter {
|
|
probability: 0.5,
|
|
min_depth: 0,
|
|
max_depth: 8,
|
|
},
|
|
},
|
|
),
|
|
(
|
|
"humanoids_active",
|
|
Cfg {
|
|
test_case: TestCase::Humanoids {
|
|
active: 4000,
|
|
inactive: 0,
|
|
},
|
|
update_filter: UpdateFilter {
|
|
probability: 1.0,
|
|
min_depth: 0,
|
|
max_depth: u32::MAX,
|
|
},
|
|
},
|
|
),
|
|
(
|
|
"humanoids_inactive",
|
|
Cfg {
|
|
test_case: TestCase::Humanoids {
|
|
active: 10,
|
|
inactive: 3990,
|
|
},
|
|
update_filter: UpdateFilter {
|
|
probability: 1.0,
|
|
min_depth: 0,
|
|
max_depth: u32::MAX,
|
|
},
|
|
},
|
|
),
|
|
(
|
|
"humanoids_mixed",
|
|
Cfg {
|
|
test_case: TestCase::Humanoids {
|
|
active: 2000,
|
|
inactive: 2000,
|
|
},
|
|
update_filter: UpdateFilter {
|
|
probability: 1.0,
|
|
min_depth: 0,
|
|
max_depth: u32::MAX,
|
|
},
|
|
},
|
|
),
|
|
];
|
|
|
|
fn print_available_configs() {
|
|
println!("available configurations:");
|
|
for (name, _) in CONFIGS {
|
|
println!(" {name}");
|
|
}
|
|
}
|
|
|
|
fn main() {
|
|
// parse cli argument and find the selected test configuration
|
|
let cfg: Cfg = match std::env::args().nth(1) {
|
|
Some(arg) => match CONFIGS.iter().find(|(name, _)| *name == arg) {
|
|
Some((name, cfg)) => {
|
|
println!("test configuration: {name}");
|
|
cfg.clone()
|
|
}
|
|
None => {
|
|
println!("test configuration \"{arg}\" not found.\n");
|
|
print_available_configs();
|
|
return;
|
|
}
|
|
},
|
|
None => {
|
|
println!("missing argument: <test configuration>\n");
|
|
print_available_configs();
|
|
return;
|
|
}
|
|
};
|
|
|
|
println!("\n{:#?}", cfg);
|
|
|
|
App::new()
|
|
.insert_resource(cfg)
|
|
.add_plugins(MinimalPlugins)
|
|
.add_plugin(TransformPlugin::default())
|
|
.add_startup_system(setup)
|
|
.add_system(update)
|
|
.run();
|
|
}
|
|
|
|
/// test configuration
|
|
#[derive(Resource, Debug, Clone)]
|
|
struct Cfg {
|
|
/// which test case should be inserted
|
|
test_case: TestCase,
|
|
/// which entities should be updated
|
|
update_filter: UpdateFilter,
|
|
}
|
|
|
|
#[allow(unused)]
|
|
#[derive(Debug, Clone)]
|
|
enum TestCase {
|
|
/// a uniform tree, exponentially growing with depth
|
|
Tree {
|
|
/// total depth
|
|
depth: u32,
|
|
/// number of children per node
|
|
branch_width: u32,
|
|
},
|
|
/// a non uniform tree (one side is deeper than the other)
|
|
/// creates significantly less nodes than `TestCase::Tree` with the same parameters
|
|
NonUniformTree {
|
|
/// the maximum depth
|
|
depth: u32,
|
|
/// max number of children per node
|
|
branch_width: u32,
|
|
},
|
|
/// one or multiple humanoid rigs
|
|
Humanoids {
|
|
/// number of active instances (uses the specified [`UpdateFilter`])
|
|
active: u32,
|
|
/// number of inactive instances (always inactive)
|
|
inactive: u32,
|
|
},
|
|
}
|
|
|
|
/// a filter to restrict which nodes are updated
|
|
#[derive(Debug, Clone)]
|
|
struct UpdateFilter {
|
|
/// starting depth (inclusive)
|
|
min_depth: u32,
|
|
/// end depth (inclusive)
|
|
max_depth: u32,
|
|
/// probability of a node to get updated (evaluated at insertion time, not during update)
|
|
/// 0 (never) .. 1 (always)
|
|
probability: f32,
|
|
}
|
|
|
|
/// update component with some per-component value
|
|
#[derive(Component)]
|
|
struct Update(f32);
|
|
|
|
/// update positions system
|
|
fn update(time: Res<Time>, mut query: Query<(&mut Transform, &mut Update)>) {
|
|
for (mut t, mut u) in &mut query {
|
|
u.0 += time.delta_seconds() * 0.1;
|
|
set_translation(&mut t.translation, u.0);
|
|
}
|
|
}
|
|
|
|
/// set translation based on the angle `a`
|
|
fn set_translation(translation: &mut Vec3, a: f32) {
|
|
translation.x = a.cos() * 32.0;
|
|
translation.y = a.sin() * 32.0;
|
|
}
|
|
|
|
fn setup(mut commands: Commands, cfg: Res<Cfg>) {
|
|
warn!(include_str!("warning_string.txt"));
|
|
|
|
let mut cam = Camera2dBundle::default();
|
|
|
|
cam.transform.translation.z = 100.0;
|
|
commands.spawn(cam);
|
|
|
|
let result = match cfg.test_case {
|
|
TestCase::Tree {
|
|
depth,
|
|
branch_width,
|
|
} => {
|
|
let tree = gen_tree(depth, branch_width);
|
|
spawn_tree(&tree, &mut commands, &cfg.update_filter, default())
|
|
}
|
|
TestCase::NonUniformTree {
|
|
depth,
|
|
branch_width,
|
|
} => {
|
|
let tree = gen_non_uniform_tree(depth, branch_width);
|
|
spawn_tree(&tree, &mut commands, &cfg.update_filter, default())
|
|
}
|
|
TestCase::Humanoids { active, inactive } => {
|
|
let mut result = InsertResult::default();
|
|
let mut rng = rand::thread_rng();
|
|
|
|
for _ in 0..active {
|
|
result.combine(spawn_tree(
|
|
&HUMANOID_RIG,
|
|
&mut commands,
|
|
&cfg.update_filter,
|
|
Transform::from_xyz(
|
|
rng.gen::<f32>() * 500.0 - 250.0,
|
|
rng.gen::<f32>() * 500.0 - 250.0,
|
|
0.0,
|
|
),
|
|
));
|
|
}
|
|
|
|
for _ in 0..inactive {
|
|
result.combine(spawn_tree(
|
|
&HUMANOID_RIG,
|
|
&mut commands,
|
|
&UpdateFilter {
|
|
// force inactive by setting the probability < 0
|
|
probability: -1.0,
|
|
..cfg.update_filter
|
|
},
|
|
Transform::from_xyz(
|
|
rng.gen::<f32>() * 500.0 - 250.0,
|
|
rng.gen::<f32>() * 500.0 - 250.0,
|
|
0.0,
|
|
),
|
|
));
|
|
}
|
|
|
|
result
|
|
}
|
|
};
|
|
|
|
println!("\n{:#?}", result);
|
|
}
|
|
|
|
/// overview of the inserted hierarchy
|
|
#[derive(Default, Debug)]
|
|
struct InsertResult {
|
|
/// total number of nodes inserted
|
|
inserted_nodes: usize,
|
|
/// number of nodes that get updated each frame
|
|
active_nodes: usize,
|
|
/// maximum depth of the hierarchy tree
|
|
maximum_depth: usize,
|
|
}
|
|
|
|
impl InsertResult {
|
|
fn combine(&mut self, rhs: Self) -> &mut Self {
|
|
self.inserted_nodes += rhs.inserted_nodes;
|
|
self.active_nodes += rhs.active_nodes;
|
|
self.maximum_depth = self.maximum_depth.max(rhs.maximum_depth);
|
|
self
|
|
}
|
|
}
|
|
|
|
/// spawns a tree defined by a parent map (excluding root)
|
|
/// the parent map must be ordered (parent must exist before child)
|
|
fn spawn_tree(
|
|
parent_map: &[usize],
|
|
commands: &mut Commands,
|
|
update_filter: &UpdateFilter,
|
|
root_transform: Transform,
|
|
) -> InsertResult {
|
|
// total count (# of nodes + root)
|
|
let count = parent_map.len() + 1;
|
|
|
|
#[derive(Default, Clone, Copy)]
|
|
struct NodeInfo {
|
|
child_count: u32,
|
|
depth: u32,
|
|
}
|
|
|
|
// node index -> entity lookup list
|
|
let mut ents: Vec<Entity> = Vec::with_capacity(count);
|
|
let mut node_info: Vec<NodeInfo> = vec![default(); count];
|
|
for (i, &parent_idx) in parent_map.iter().enumerate() {
|
|
// assert spawn order (parent must be processed before child)
|
|
assert!(parent_idx <= i, "invalid spawn order");
|
|
node_info[parent_idx].child_count += 1;
|
|
}
|
|
|
|
// insert root
|
|
ents.push(
|
|
commands
|
|
.spawn((root_transform, GlobalTransform::default()))
|
|
.id(),
|
|
);
|
|
|
|
let mut result = InsertResult::default();
|
|
let mut rng = rand::thread_rng();
|
|
// used to count through the number of children (used only for visual layout)
|
|
let mut child_idx: Vec<u16> = vec![0; count];
|
|
|
|
// insert children
|
|
for (current_idx, &parent_idx) in parent_map.iter().enumerate() {
|
|
let current_idx = current_idx + 1;
|
|
|
|
// separation factor to visually separate children (0..1)
|
|
let sep = child_idx[parent_idx] as f32 / node_info[parent_idx].child_count as f32;
|
|
child_idx[parent_idx] += 1;
|
|
|
|
// calculate and set depth
|
|
// this works because it's guaranteed that we have already iterated over the parent
|
|
let depth = node_info[parent_idx].depth + 1;
|
|
let info = &mut node_info[current_idx];
|
|
info.depth = depth;
|
|
|
|
// update max depth of tree
|
|
result.maximum_depth = result.maximum_depth.max(depth.try_into().unwrap());
|
|
|
|
// insert child
|
|
let child_entity = {
|
|
let mut cmd = commands.spawn_empty();
|
|
|
|
// check whether or not to update this node
|
|
let update = (rng.gen::<f32>() <= update_filter.probability)
|
|
&& (depth >= update_filter.min_depth && depth <= update_filter.max_depth);
|
|
|
|
if update {
|
|
cmd.insert(Update(sep));
|
|
result.active_nodes += 1;
|
|
}
|
|
|
|
let transform = {
|
|
let mut translation = Vec3::ZERO;
|
|
// use the same placement fn as the `update` system
|
|
// this way the entities won't be all at (0, 0, 0) when they don't have an `Update` component
|
|
set_translation(&mut translation, sep);
|
|
Transform::from_translation(translation)
|
|
};
|
|
|
|
// only insert the components necessary for the transform propagation
|
|
cmd.insert((transform, GlobalTransform::default()));
|
|
|
|
cmd.id()
|
|
};
|
|
|
|
commands
|
|
.get_or_spawn(ents[parent_idx])
|
|
.add_child(child_entity);
|
|
|
|
ents.push(child_entity);
|
|
}
|
|
|
|
result.inserted_nodes = ents.len();
|
|
result
|
|
}
|
|
|
|
/// generate a tree `depth` levels deep, where each node has `branch_width` children
|
|
fn gen_tree(depth: u32, branch_width: u32) -> Vec<usize> {
|
|
// calculate the total count of branches
|
|
let mut count: usize = 0;
|
|
for i in 0..(depth - 1) {
|
|
count += TryInto::<usize>::try_into(branch_width.pow(i)).unwrap();
|
|
}
|
|
|
|
// the tree is built using this pattern:
|
|
// 0, 0, 0, ... 1, 1, 1, ... 2, 2, 2, ... (count - 1)
|
|
(0..count)
|
|
.flat_map(|i| std::iter::repeat(i).take(branch_width.try_into().unwrap()))
|
|
.collect()
|
|
}
|
|
|
|
/// recursive part of [`gen_non_uniform_tree`]
|
|
fn add_children_non_uniform(
|
|
tree: &mut Vec<usize>,
|
|
parent: usize,
|
|
mut curr_depth: u32,
|
|
max_branch_width: u32,
|
|
) {
|
|
for _ in 0..max_branch_width {
|
|
tree.push(parent);
|
|
|
|
curr_depth = curr_depth.checked_sub(1).unwrap();
|
|
if curr_depth == 0 {
|
|
return;
|
|
}
|
|
add_children_non_uniform(tree, tree.len(), curr_depth, max_branch_width);
|
|
}
|
|
}
|
|
|
|
/// generate a tree that has more nodes on one side that the other
|
|
/// the deepest hierarchy path is `max_depth` and the widest branches have `max_branch_width` children
|
|
fn gen_non_uniform_tree(max_depth: u32, max_branch_width: u32) -> Vec<usize> {
|
|
let mut tree = Vec::new();
|
|
add_children_non_uniform(&mut tree, 0, max_depth, max_branch_width);
|
|
tree
|
|
}
|
|
|
|
/// parent map for a decently complex humanoid rig (based on mixamo rig)
|
|
const HUMANOID_RIG: [usize; 67] = [
|
|
// (0: root)
|
|
0, // 1: hips
|
|
1, // 2: spine
|
|
2, // 3: spine 1
|
|
3, // 4: spine 2
|
|
4, // 5: neck
|
|
5, // 6: head
|
|
6, // 7: head top
|
|
6, // 8: left eye
|
|
6, // 9: right eye
|
|
4, // 10: left shoulder
|
|
10, // 11: left arm
|
|
11, // 12: left forearm
|
|
12, // 13: left hand
|
|
13, // 14: left hand thumb 1
|
|
14, // 15: left hand thumb 2
|
|
15, // 16: left hand thumb 3
|
|
16, // 17: left hand thumb 4
|
|
13, // 18: left hand index 1
|
|
18, // 19: left hand index 2
|
|
19, // 20: left hand index 3
|
|
20, // 21: left hand index 4
|
|
13, // 22: left hand middle 1
|
|
22, // 23: left hand middle 2
|
|
23, // 24: left hand middle 3
|
|
24, // 25: left hand middle 4
|
|
13, // 26: left hand ring 1
|
|
26, // 27: left hand ring 2
|
|
27, // 28: left hand ring 3
|
|
28, // 29: left hand ring 4
|
|
13, // 30: left hand pinky 1
|
|
30, // 31: left hand pinky 2
|
|
31, // 32: left hand pinky 3
|
|
32, // 33: left hand pinky 4
|
|
4, // 34: right shoulder
|
|
34, // 35: right arm
|
|
35, // 36: right forearm
|
|
36, // 37: right hand
|
|
37, // 38: right hand thumb 1
|
|
38, // 39: right hand thumb 2
|
|
39, // 40: right hand thumb 3
|
|
40, // 41: right hand thumb 4
|
|
37, // 42: right hand index 1
|
|
42, // 43: right hand index 2
|
|
43, // 44: right hand index 3
|
|
44, // 45: right hand index 4
|
|
37, // 46: right hand middle 1
|
|
46, // 47: right hand middle 2
|
|
47, // 48: right hand middle 3
|
|
48, // 49: right hand middle 4
|
|
37, // 50: right hand ring 1
|
|
50, // 51: right hand ring 2
|
|
51, // 52: right hand ring 3
|
|
52, // 53: right hand ring 4
|
|
37, // 54: right hand pinky 1
|
|
54, // 55: right hand pinky 2
|
|
55, // 56: right hand pinky 3
|
|
56, // 57: right hand pinky 4
|
|
1, // 58: left upper leg
|
|
58, // 59: left leg
|
|
59, // 60: left foot
|
|
60, // 61: left toe base
|
|
61, // 62: left toe end
|
|
1, // 63: right upper leg
|
|
63, // 64: right leg
|
|
64, // 65: right foot
|
|
65, // 66: right toe base
|
|
66, // 67: right toe end
|
|
];
|